
Am 24. September 2024 fand im Rahmen der 27. IEEE International Conference on Intelligent Transportation Systems (ITSC) in Edmonton, Kanada, der dritte Workshop zum Thema „Intelligenter und automatisierter Wasserstraßentransport“ statt, der in diesem Jahr von der Bundesanstalt für Wasserbau (BAW) (vertreten durch Jannis Daubner, Kathrin Donandt und Lahbib Zentari, W4) mitorganisiert und gesponsert wurde. Das Event erwies sich als äußerst spannend und bot Gelegenheit für den intensiven Austausch zwischen Forschenden aus den Bereichen Automatisierung in der Binnen- und maritimen Schifffahrt.
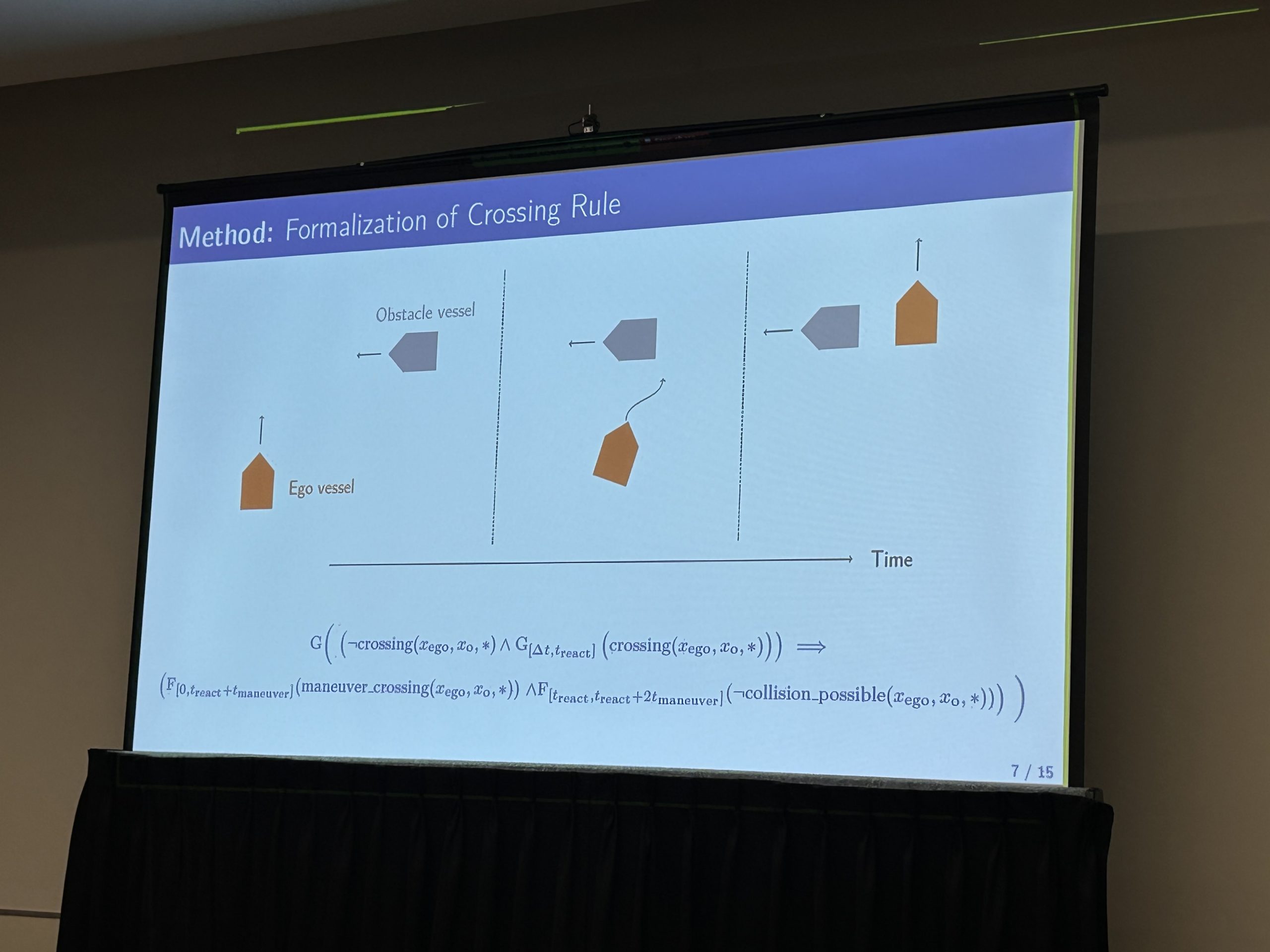
Den Auftakt bildete der Keynote-Vortrag von Lahbib Zentari (BAW), der mit seiner Präsentation über die Potenziale von KI-Tools zur Bewertung der Navigationssicherheit auf deutschen Binnenwasserstraßen den Nachmittag eröffnete. Die eingeladenen Expertinnen und Experten boten daraufhin Einblicke in aktuelle Forschungsprojekte, die intensive Gespräche und Diskussionen anregten. Nicola Forti von der Universität Florenz sprach über den Fortschritt intelligenter maritimer Systeme und die Herausforderungen bei der Vorhersage von Schiffsbewegungen sowie der Erkennung von Anomalien. Paul Koch vom Fraunhofer-Zentrum für Maritime Logistik und Dienstleistungen hob in seinem Vortrag die Komplexität der Einhaltung internationaler Kollisionsverhütungsregeln (COLREG) durch autonome Schiffe hervor und präsentierte einen regelbasierten Ansatz zur Realisierung von COLREG-Konformität. Die Formalisierung der COLREG wurde ebenfalls im Vortrag von Hanna Krasowski (University of California, Berkeley, USA) thematisiert, in dem es darum ging, wie einem Reinforcement-Learning-Agenten die Einhaltung der COLREG vermittelt werden kann.
Nach einer Kaffeepause, die den Teilnehmenden Raum für persönlichen Austausch bot, ging es in der zweiten Hälfte des Workshops mit weiteren Vorträgen. Lars Grundhöfer vom Deutschen Zentrum für Luft- und Raumfahrt präsentierte die kanadische R-Mode Testumgebung als Ergänzung zu GNSS-Systemen, während Tim Reuscher von der RWTH Aachen sicherheitsorientierte Steuerungs- und Navigationskonzepte für automatisierte Flussfähren vorstellte. Den Abschluss des Workshops bildete eine angeregte Diskussion zum Thema Zulassung von KI-basierten Systemen in der Schifffahrt.
Der Workshop fungiert als wichtige Plattform für den internationalen Austausch von Wissen und Innovationen, mit dem Ziel, die Sicherheit und Effizienz des Wasserstraßentransports weiter voranzutreiben. Die Teilnehmenden des diesjährigen Workshops konnten wertvolle Erkenntnisse und Anregungen für sich mitnehmen. Die Workshop-Reihe soll nächstes Jahr auf der ITSC 2025 in Australien fortgesetzt werden.

Verfasst von Kathrin Donandt
- Web |
- More Posts(1)