Beitrag von Carl-Uwe Böttner und Bernhard Kondziella
Die BAW betreibt in Hamburg in der Halle 1 ein Flachwasserbecken. Neben Grundlagenuntersuchungen werden hier auch WSV-Aufträge bearbeitet. In den vergangenen Jahrzehnten waren dies in den allermeisten Fällen Untersuchungen zur Ausbreitung schifferzeugter Wellen und den damit einhergehenden schifferzeugten Belastungen.
So kamen die Schiffe in unser wasserbauliches Versuchsbecken, zumeist im Modellmaßstab 1:40. Zum ersten Mal geschah dies vor einem viertel Jahrhundert. Damit die Schiffe auf Kurs blieben, wurden sie an einem Seil geführt. Dies, und mehr zu unseren Versuchen, kann man schön in diesem Video einer Untersuchung zur Ausbreitung schifferzeugter Wellensysteme am Hamburger Yachthafen aus den Jahren 2006 und 2007 sehen.

Aus dem Physik-Unterricht ist bekannt: Man kann das Seil spannen, wie man will, es wird immer einen Durchhang haben. Bei Fahrten außerhalb der Kanalmitte fährt das Modellschiff aufgrund seitlich angreifender Kräfte (Bank-Effekt) einen gebogenen Pfad durchs Becken und hält damit keinen konstanten Abstand zur Böschung. Unter Naturbedingungen wird der Rudergänger die seitlichen Kräfte durch Ruderbewegungen ausgleichen und damit den Kurs halten können.
Die Lösung dafür: Das Modellschiff wird an einem festen Kragarm befestigt, der auf einem Schienensystem geführt wird.
Da nun aber das Modellschiff nicht nur sich selbst antreiben muss, sondern auch noch den Arm mitschleppen muss, würde damit das erzeugte Wellensystem stark verändert sein. Es ist ein größerer Energieeintrag in das System erforderlich um das Schiff anzutreiben, was sich dann auch im entstehenden Wellenbild zeigt.
Die Lösung dafür: der Kragarm bekommt, wie das Schiff, einen eigenen Antrieb: einen Luftpropeller, im Bild links oben der Metallring. Dieser wird so gesteuert, dass er das Schiff gerade nicht antreibt und nicht bremst.

Diese im Jahr 2009 umgesetzte Weiterentwicklung bildete einen deutlichen Fortschritt in der eingesetzten Versuchstechnik und hat sich in vielen nachfolgenden Untersuchungen bewährt. Natürlich wurde die Konstruktion bei jedem neuen Versuchsaufbau in Details verbessert, verstärkt, versteift, anders angesteuert, lessons learned, oder kontinuierlicher Verbesserungsprozess eben. Aber: wie das Seil, hatte auch dieser Aufbau Einschränkungen: das Modellschiff musste sich weiterhin selbst in Fahrt bringen (beschleunigen), die erreichte Zielgeschwindigkeit aufrechterhalten und vor dem Ende des Beckens selbständig abbremsen. Das hat meist geklappt. Für manches Untersuchungsziel wäre es besser, wenn das Modellschiff eine feste, konstante Geschwindigkeit aufgezwungen bekommen könnte und der eigene Antrieb dann auf den Zustand „beschleunigen“ oder „bremsen“ eingestellt werden könnte.
In Modellversuchen laufen alle zeitbehafteten Größen aufgrund der Modellgesetze im Zeitraffer. Das heißt für eine Untersuchung der hydrodynamischen Effekte beim Beschleunigen oder Verzögern ist für eine Messung zu wenig Zeit, bis sich wieder ein Gleichgewicht eingestellt hat.
Die Lösung dafür: Ein Schleppwagen, der das Modellschiff führt.
Diese Variante schwirrte schon länger in unseren Köpfen herum, aber bei 32 m Beckenbreite, die es zu überspannen gilt, wäre das Gerät viel zu schwer für das Fundament unserer Halle.
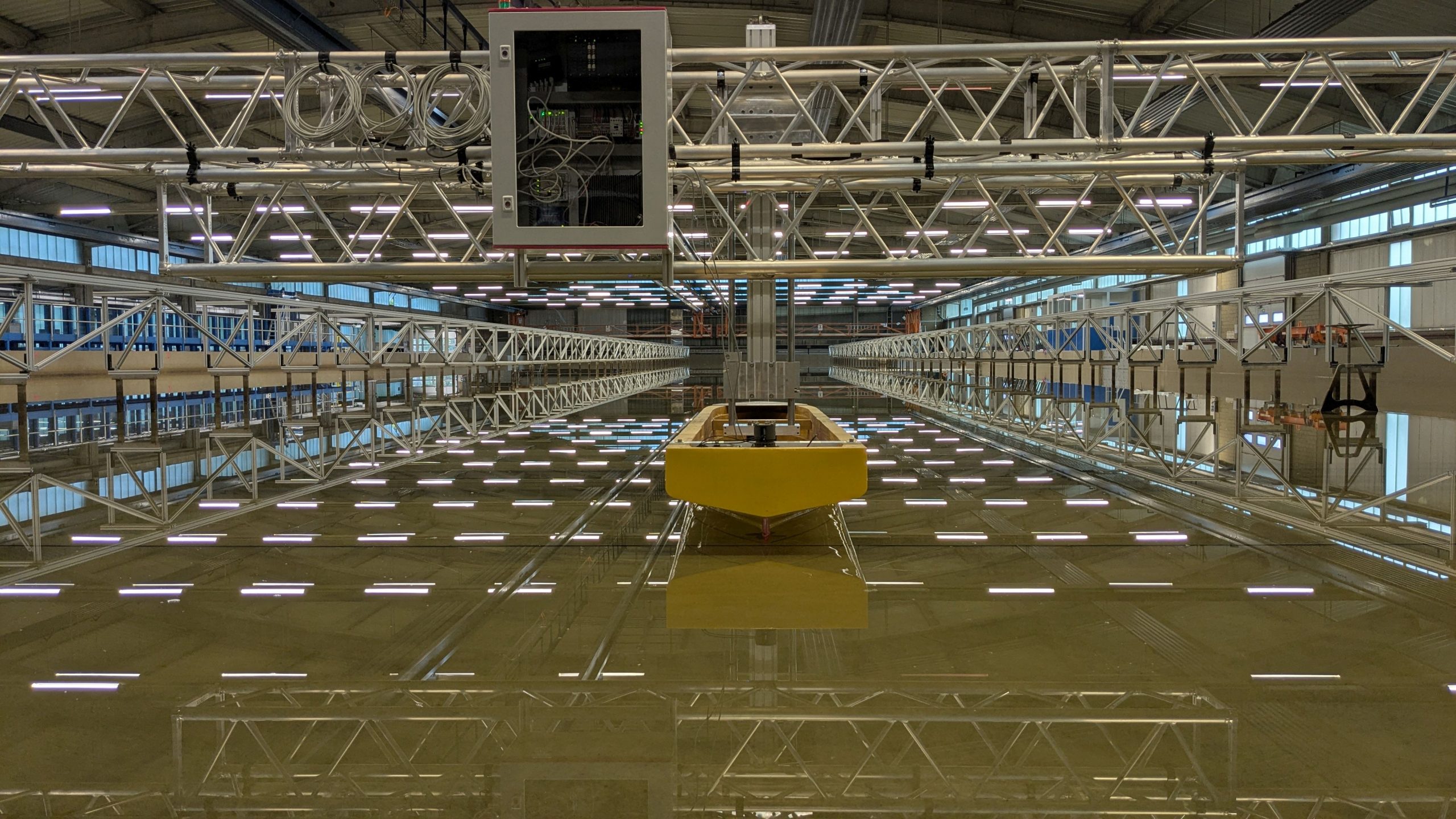
Also haben wir an einer Lösung mit kleinerer Spannweite gearbeitet. Auf Basis der Erfahrungen mit dem Kragarm haben wir einen beidseitig gestützten Wagen konstruiert, der über vier stufenlos einstellbare, synchron laufende Motoren mit Gummiwalzen angetrieben wird. Entlang der realisierten Spannweite von rund 11,70 m kann das Modellschiff an beliebiger Position montiert werden. Für die Datenfans (wie wir selbst welche sind), haben wir weitere technische Details in der Tabelle am Ende des Blog-Eintrags zusammengestellt.
Das Ergebnis, unseres selbst konstruierten Schleppwagens, ist ziemlich überzeugend geworden, wie wir finden und wie hier bei einer der ersten Testfahrten zu sehen ist:

Damit sind wir jetzt in der Lage alle Untersuchungen durchzuführen, die im schiffbaulichen Versuchswesen in einem Schlepptank gemacht werden, bei uns natürlich ausschließlich im flachen Wasser.
Dieses System wird auch weiter verbessert, keine Frage, da bleiben wir dran.
Technische Daten des Schleppwagens im Flachwasserbecken:
| Fahrstrecke | 80 | m |
| Spannweite | 11,7 | m |
| Geschwindigkeit von – bis | 0,2 – 1,5 (+/- 0,0001) | m/s |
| Gewicht Schienensystem | 3200 | Kg |
| Nennleistung Motoren | 4 * 0,36 | kW |
| Peakleistung Motoren | 4 * 0,96 | kW |
| Akku-Speicher | 4 * 0,5 (48V Unenn) | kWh |
Verfasst von Bernhard Kondziella
Als technischer Angestellter bin ich überwiegend im Bereich der Naturmessungen und im Bereich des physikalischen Modellwesens tätig. Angesiedelt sind diese Themen im Referat K1 "Küsteningenieurwesen" der Dienststelle Hamburg.
- Web |
- More Posts(4)